Thanks Tim! Great answer.
Over to you, Fred!
David
Over to you, Fred!
David

* THE FORUM FOR ALL THOSE INTERESTED IN BUILDING AND OPERATING MODEL SUBMARINES *

In total there are 4 users online :: 0 Registered, 0 Hidden and 4 Guests
None
Most users ever online was 180 on Tue Nov 05, 2019 6:03 am
Our users have posted a total of 12534 messages in 1992 subjects
We have 1021 registered users
The newest registered user is Mike Echo

 Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Wed Aug 24, 2016 8:23 am
david f Wed Aug 24, 2016 8:23 am

 Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() Deep Diver (Fred) Thu Aug 25, 2016 6:23 am
Deep Diver (Fred) Thu Aug 25, 2016 6:23 am
 Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Fri Aug 26, 2016 4:07 pm
tsenecal Fri Aug 26, 2016 4:07 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() Deep Diver (Fred) Thu Sep 01, 2016 8:10 am
Deep Diver (Fred) Thu Sep 01, 2016 8:10 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Tue Sep 13, 2016 3:59 pm
tsenecal Tue Sep 13, 2016 3:59 pm
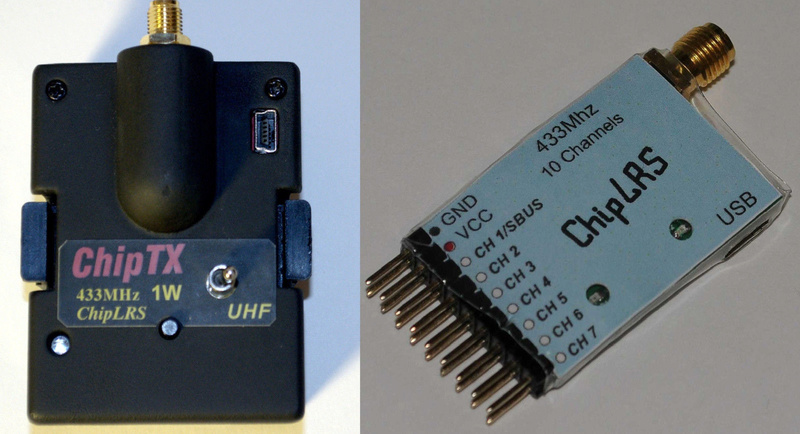
Deep Diver (Fred) wrote:I have had an email from HobbyKing saying that the OrangeRx Open LRS 433MHz 9Ch Receiver is now back in stock,
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Wed Sep 14, 2016 10:47 am
david f Wed Sep 14, 2016 10:47 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() Deep Diver (Fred) Mon Sep 19, 2016 8:59 am
Deep Diver (Fred) Mon Sep 19, 2016 8:59 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Mon Sep 19, 2016 9:50 am
david f Mon Sep 19, 2016 9:50 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Tue Oct 11, 2016 9:43 am
david f Tue Oct 11, 2016 9:43 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Wed Feb 22, 2017 5:06 am
tsenecal Wed Feb 22, 2017 5:06 am
 Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() bwi Sun Feb 26, 2017 7:46 am
bwi Sun Feb 26, 2017 7:46 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Sun Feb 26, 2017 5:10 pm
tsenecal Sun Feb 26, 2017 5:10 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Sat Mar 04, 2017 11:43 am
david f Sat Mar 04, 2017 11:43 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Sun Mar 05, 2017 5:59 pm
tsenecal Sun Mar 05, 2017 5:59 pm
david f wrote:
Interesting that you are looking at 915Mhz. A quick check indicates that we don't have that for r/c in the UK. I count ourselves lucky that someone way back allocated 458Mhz.
David
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Wed Mar 08, 2017 9:39 pm
tsenecal Wed Mar 08, 2017 9:39 pm
 Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Fri Apr 28, 2017 5:07 pm
tsenecal Fri Apr 28, 2017 5:07 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Fri May 26, 2017 10:35 pm
tsenecal Fri May 26, 2017 10:35 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Sat May 27, 2017 4:02 pm
david f Sat May 27, 2017 4:02 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Wed Jun 07, 2017 4:44 pm
tsenecal Wed Jun 07, 2017 4:44 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Thu Oct 05, 2017 2:02 pm
david f Thu Oct 05, 2017 2:02 pm

 Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Fri Oct 06, 2017 5:33 pm
tsenecal Fri Oct 06, 2017 5:33 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() david f Tue Oct 10, 2017 9:25 am
david f Tue Oct 10, 2017 9:25 am
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Mon Nov 20, 2017 4:11 pm
tsenecal Mon Nov 20, 2017 4:11 pm
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Mon Nov 20, 2017 10:24 pm
tsenecal Mon Nov 20, 2017 10:24 pm
david f wrote:....
PS Just made a mention of openLRS on the SubCommittee forum. It can only help.
Re: UHF radio control for submarines (openLRS, LoRa, FSK etc. on 458Mhz and 433Mhz )![]() tsenecal Mon Nov 20, 2017 10:29 pm
tsenecal Mon Nov 20, 2017 10:29 pm
david f wrote:Looking back at your post before last and the use of 868 Mhz in the UK. It doesn't seem to be available:
http://www.ukrcc.org/40mhz.html
So it is 458 or nothing for us here.
» RC Drift Gyro for pitch control
» WW2 mini sub build
» sonar data link
» Robbe Seawolf V2
» ExpressLRS - 868/915 Mhz equipment
» Flight controllers as sub levelers
» 868/915 Mhz as a viable frequency for submarines.
» Microgyro pitch controller corrosion